 We analyze two loss functions for improving boundary-level predictions in semantic segmentation.
We analyze two loss functions for improving boundary-level predictions in semantic segmentation.Abstract
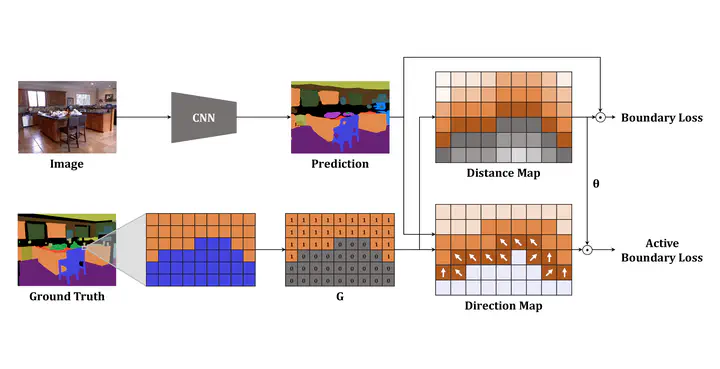
Providing fine-grained and accurate segmentation maps of indoor scenes is a challenging task with relevant applications in the fields of augmented reality, image retrieval, and personalized robotics. While most of the recent literature on semantic segmentation has focused on outdoor scenarios, the generation of accurate indoor segmentation maps has been partially under-investigated. With the goal of increasing the accuracy of semantic segmentation in indoor scenarios, we focus on the analysis of boundary-level objectives, which foster the generation of fine-grained boundaries between different semantic classes and which have never been explored in the case of indoor segmentation. In particular, we test and devise variants of both the Boundary and Active Boundary losses, two recent proposals which deal with the prediction of semantic boundaries. Through experiments on the NYUDv2 dataset, we quantify the role of such losses in terms of accuracy and quality of boundary prediction and demonstrate the accuracy gain of the proposed variants.
🔥Oral Presentation
Roberto Amoroso
Senior Research Engineer @ NVIDIA
VLMs & Multimodal Retrieval
Senior Research Engineer at NVIDIA working on Vision-Language Models for video understanding and large-scale multimodal retrieval.